
2020 Infinite Recharge
WIP
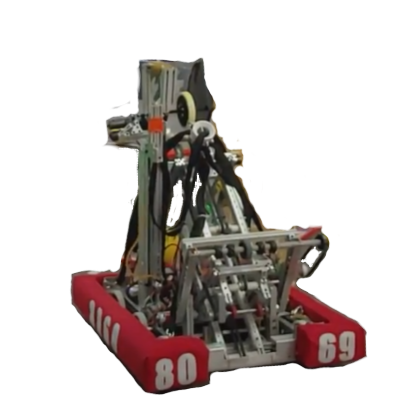 WIP was our first robot. It was designed to compete in the cancelled 2020 Infinite Recharge game. Infinite Recharge involved scoring 7 inch (~17cm) spherical yellow
balls known as power cells into apertures known as ports, manipulating multi-coloured wheels known as control panels and hanging from large triangular pivoting structures called generator switches. WIP was designed to accomplish two of
the aforementioned tasks scoring power cells and climbing the generator switches. The name ‘WIP’ is an acronym for Work In Progress. The name is a humorous (but accurate) reference to the number of times the robot was rebuilt and to how
many problems it had.
WIP was our first robot. It was designed to compete in the cancelled 2020 Infinite Recharge game. Infinite Recharge involved scoring 7 inch (~17cm) spherical yellow
balls known as power cells into apertures known as ports, manipulating multi-coloured wheels known as control panels and hanging from large triangular pivoting structures called generator switches. WIP was designed to accomplish two of
the aforementioned tasks scoring power cells and climbing the generator switches. The name ‘WIP’ is an acronym for Work In Progress. The name is a humorous (but accurate) reference to the number of times the robot was rebuilt and to how
many problems it had.
Climbing Sub-System
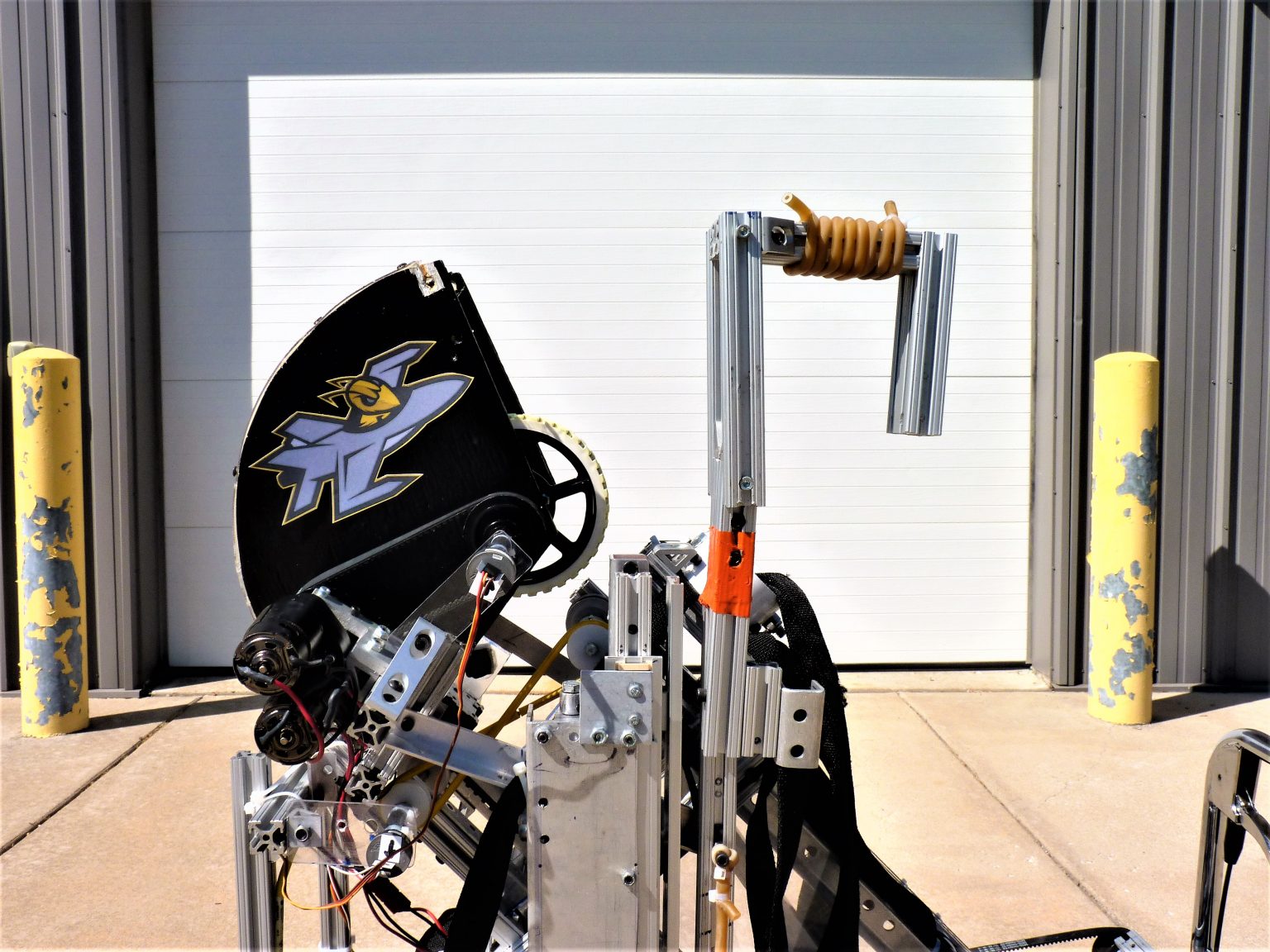
Hook
The hook was made from 5 pieces of aluminum and had surgical tubing to prevent slippage. Originally it was intended for there to be a trolley which would be able to move along the bar to stabilize the bar, however this proved to be too heavy as the robot was 3lbs (1.30777kg) over the weight limit 125lbs (~57kg).
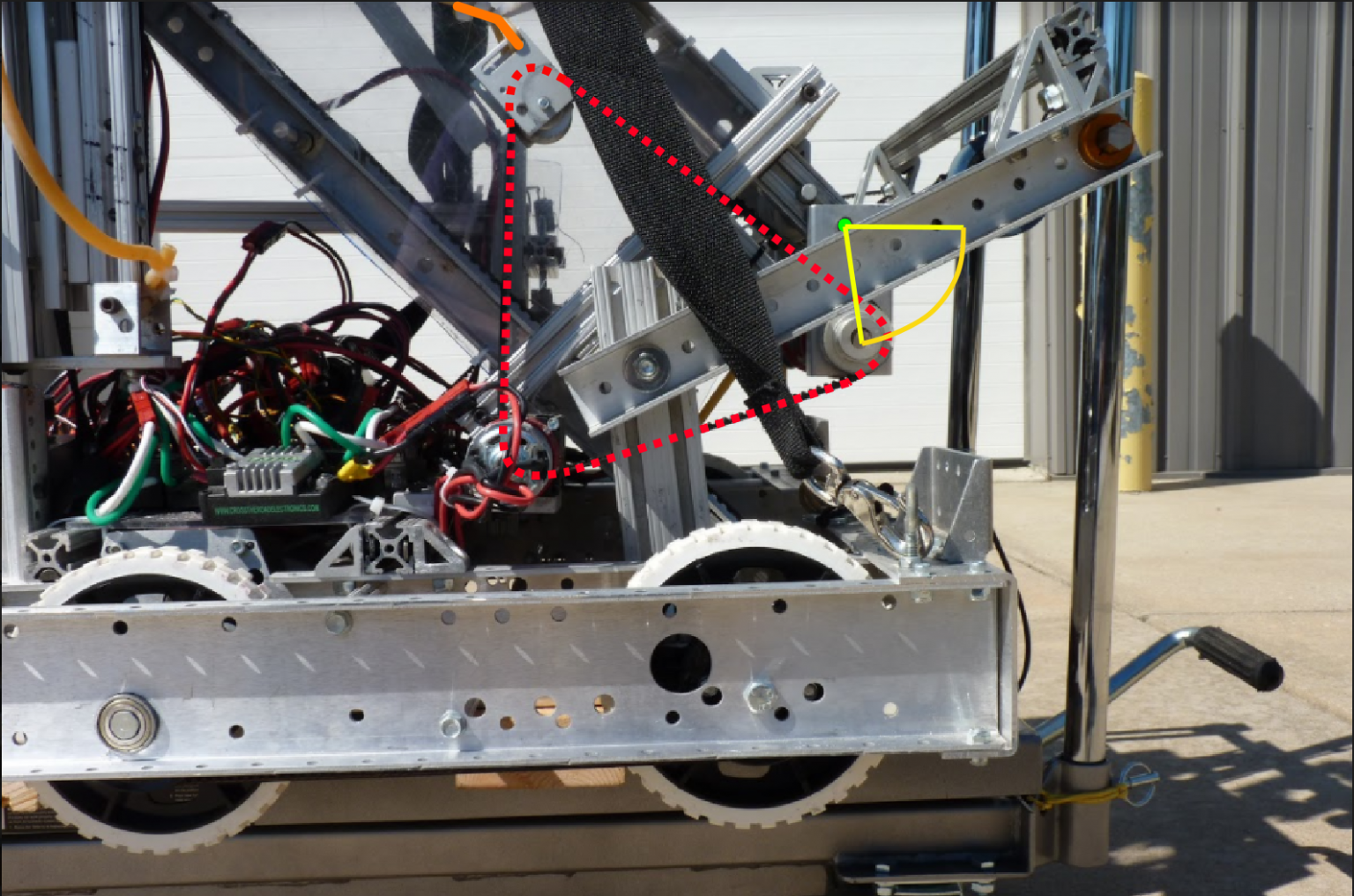
Elevator
WIP had an unusual elevator mechanism which would raise the hook onto the bar. The elevator was pushed upwards by a single motor through a lead screw; the second and third stages were pulled up by a parachute cable.
Winch
The winch was a mechanism which consisted of a ½ in. (1.27cm) hex shaft with a piece of heavy strap tied to said hex shaft powered by two 775pro motors in a dual input gearbox with a ratchet on the end. It also had an AND gate which would prevent accidental activation.
shooter
The shooter was made from plywood, lexan, 2 775 motors in a dual input gearbox, a belt, and a K.O.P. wheel from a previous season.
loader
The loader had a metering system which used two optical sensors (one analogue, one digital) and five (5) logic gates (case structures) to properly distance balls. It had two large belts with which it would transport balls; however the pulleys would sometimes cut into the power cells, destroying them. There were two instances of the loader becoming jammed and its motor burning out. We had to rebuild the ball storage 7+ times…
Intake
The ball intake consisted of two parts, the ball retainer and the intake arm, the ball retainer had a very unique way of tensioning the belt that was powering it. The intake arm was two pieces of metal with a motor and belt connecting to a ½ inch hex shaft with mini mecanum wheels and a stealth wheel.
Interesting information: WIP had fifteen motors and eleven motor controllers as evident in its open VI.